The Stanford Assistant Mobile Manipulator (SAMM)
The objective of this research is the development of an automated
mobile "assistant" to aid workers with material handling tasks. Our
motivation is to reduce the physical effort in
manipulating and positioning large, awkward loads. The robotic
assistant is designed to supplement the physical capabilities of a
human operator, providing an "extra pair of hands" that can move a
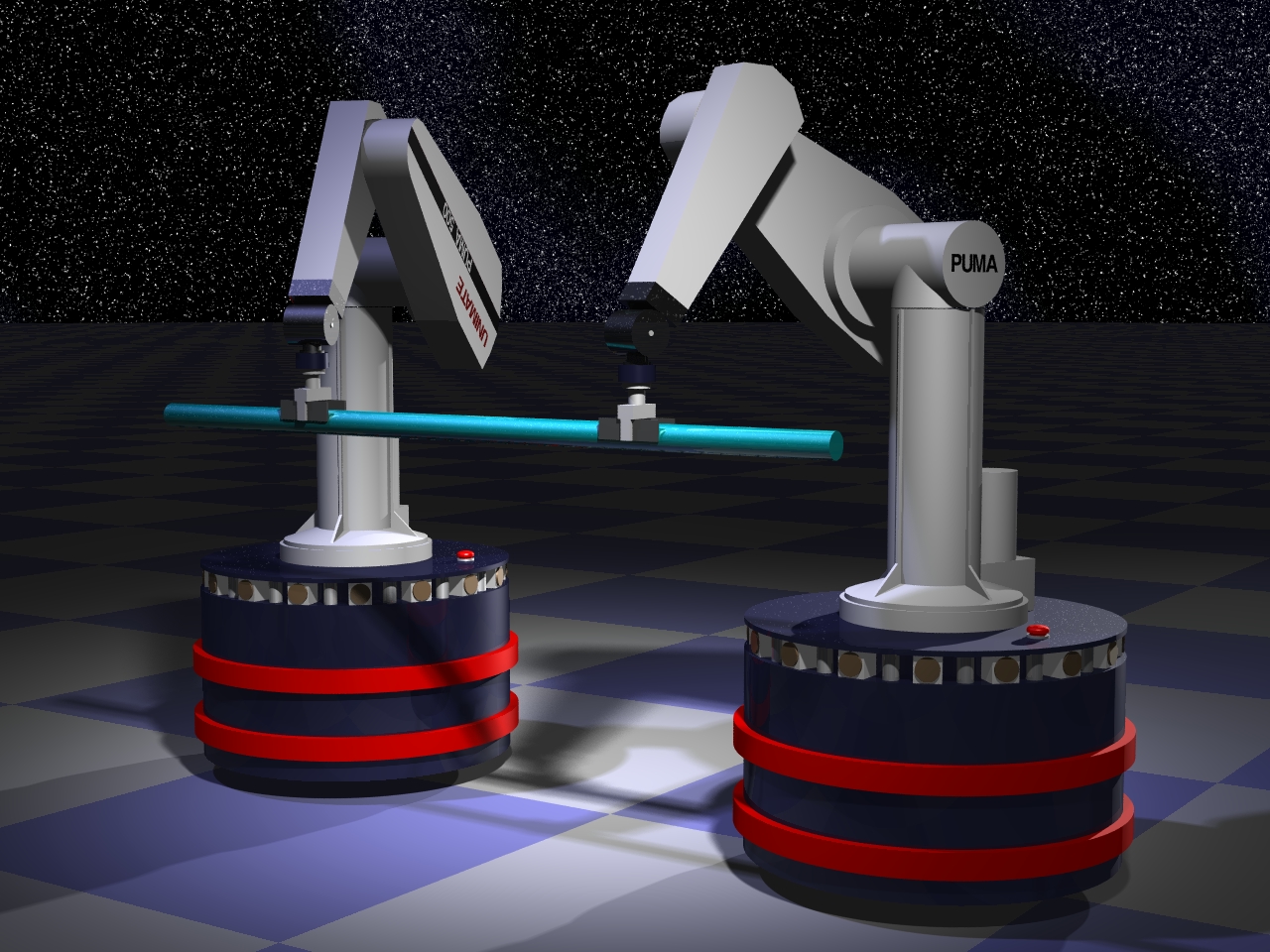
load in response to forces he exerts. Multiple robot assistants will
work cooperatively in moving, and positioning objects under the
supervision of the human operator.
A system of two mobile manipulation platforms have been designed and built at Stanford University in collaboration with Nomadic Technologies, and Oakridge National Laboratories. Each platform consists of a Puma 560 manipulator mounted on a holonomic mobile base. The platforms are self-contained, fully-integrated systems, equipped with a host of sensors, a multi-processing system, multi-axis controller, and sufficient on-board power for autonomous operations.
The approach is based on four methodologies we have previously developed for fixed-base manipulation: the operational space formulation for task-oriented control; the dextrous dynamic coordination of macro/mini structures for vehicle/arm coordination; the augmented object model to describe the closed-chain dynamics for multiple-robot systems; and the virtual linkage model for characterizing internal forces.


 One arm motion with operational space & null space control MPEG (562K)
One arm motion with operational space & null space control MPEG (562K)
 Cooperative compliant motion MPEG (1.6MB)
Cooperative compliant motion MPEG (1.6MB)

