Class #10:
Criticality-Based Motion: Assembly Planning
________________________________________________________________________________________________________________
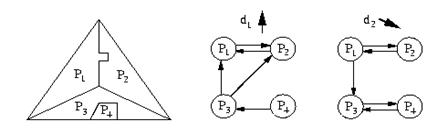
Four pictures illustrating assembly
planning and the concept of a blocking graph
- Topics
- Application of criticality-based planning to assembly planning
- Motion space
- Blocking relation and non-directional blocking graph - Readings:
- The non-directional blocking graph
approach to assembly planning:
R.H. Wilson and J.C. Latombe. Geometric Reasoning About Assembly. Artificial Intelligence, 71(2), 1994 [pdf] - Related assembly planners:
- S.G. Kaufman, R.H. Wilson, R.E. Jones, T.L. Calton, and A.L. Ames. The Archimedes 2 Mechanical Assembly Planning System. Proceedings of the IEEE International Conference on Robotics and Automation, pages 3361-3368, 1996. [pdf]
- B. Romney. Atlas: An Automatic Assembly Sequencing and Fixturing System. Proceedings of the International Conference on the Theory and Practice of Geometric Modelling, W. Strasser, R. Klein, and R. Rau (eds.), Springer-Verlag, pages 397-415, 1997. [pdf] - Slides