Class #13: Kinodynamic
Planning ________________________________________________________________________________________________________________
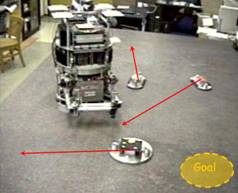
The ARL “space” robot
(left) is a mobile robot on air bearing. It is actuated by air thrusters.
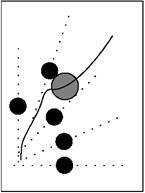
Planning its motion requires taking dynamic constraints into account. The
second drawing from the left show the robot (gray disc) negotiating its ways
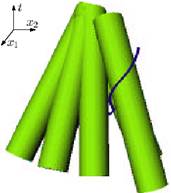
through moving obstacles. The third drawing shows the robot’s trajectory
in configuration x time space (the green cylinders are the maps of the moving
obstacles).
- Topics
- Dynamic motion constraints
- Treatment of kinodynamic constraints in probabilistic roadmap planner
- Probabilistic roadmap in state x time space
- “Real-time” motion planning - Readings:
- PRM-based kinodynamic planners:
D. Hsu, R. Kindel, J.C. Latombe, and S. Rock. Randomized Kinodynamic Motion Planning with Moving Obstacles. Int. J. of Robotics Research, 21(3):233-255, March 2002. [pdf] - Kynodynamic planning:
S. M. LaValle and J. J. Kuffner. Randomized Kinodynamic Planning. International Journal of Robotics Research, 20(5):378--400, May 2001. [pdf]
- Slides