Class #6: Collision Detection and Distance Computation
___________________________________________________________________________________________________________
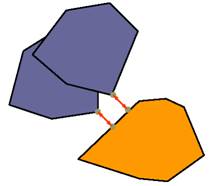

The figure on the
left illustrates the coherence principle on which feature-tracking methods are
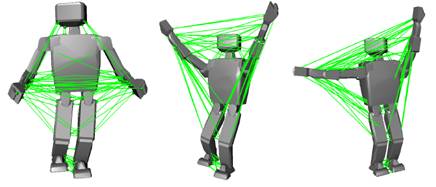
based. The figures on the center illustrate the application of feature-tracking
to detect self-collision in a humanoid robot. The image on the right depicts a
“triangulated cat” and a subset of the sphere hierarchy used to
approximate this model at successive levels for hierarchical collision
detection.
- Topics:
- Feature-tracking approach
- Application to detection of self-collision in a humanoid robot
- Bounding Volume Hierarchy (BVH) approach
- Static vs. dynamic collision checking - Required
- Basic paper on feature-tracking approach:
M. Lin and J. Canny. A Fast Algorithm for Incremental Distance Calculation. Proc. IEEE Int.
Conf. on Robotics and Automation, pp. 1008-1014, 1991. [pdf] - Bounding Volume
Hierarchy (with spheres):
S. Quinlan. Efficient Distance Computation Between Non-Convex Objects. Proc. IEEE Int. Conf. on Robotics and Automation, 1994. [pdf]
- Other
- Grid method:
D. Halperin and M.H. Overmars Spheres, Molecules, and Hidden Surface Removal. Computational Geometry: Theory and Applications 11 (2), 1998, 83-102. [pdf]
- Self-collision
detection in humanoid robot:
J. Kuffner et al. Self-Collision and Prevention for Humanoid Robots. Proc. IEEE Int. Conf. on Robotics and Automation, 2002. [pdf]
- Adaptive bisection in dynamic collision
checking
F. Schwarzer, M. Saha, J.C. Latombe. Adaptive Dynamic Collision Checking for Single and Multiple Articulated Robots in Complex Environments, manuscript, 2003. [pdf] - Slides