Class #7: Sampling and
Connection Strategies for Probabilistic Roadmaps
___________________________________________________________________________________________________________
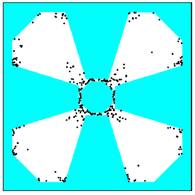
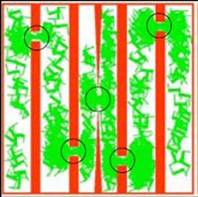
The Bridge Test strategy (left)
is aimed at producing a higher density of milestones in narrow passages.
Workspace-based sampling (center) tries to predict narrow passage areas in
configuration space from an analysis of the workspace. The small-step retraction
strategy (right) slightly dilates free space to increase expansiveness.
- Topics
- Multi-query vs. single-query sampling
- Sampling vs. connection strategies
- Workspace-based strategies
- Filtering strategies
- Adaptive strategies
- Deformation strategies
- Delayed collision checking - Readings:
- Filtering strategies:
- Gaussian sampling:
V. Boor, M.H. Overmars, A.F. van der Stappen. The Gaussian sampling strategy for probabilistic roadmap planners. Proc. IEEE Int. Conf. on Robotics and Automation, pp. 1018-1023, 1999 [pdf].
- Bridge test:
D. Hsu, T. Jiang, J. Reif, and Z. Sun. The Bridge Test for Sampling Narrow Passages with Probabilistic Roadmap Planners. Proc. IEEE Int. Conf. on Robotics and Automation, - Workspace-based strategy:
H. Kurniawati and D. Hsu. Workspace-Based Connectivity Oracle: An Adaptive Sampling Strategy for PRM Planning. In S. Akella et al., editors, Proc. Int. Workshop on the Algorithmic Foundations of Robotics (WAFR), Springer, 2006. [pdf]. - Small-step retraction:
M. Saha, J.C. Latombe, Y.-C. Chang, F. Prinz. Finding Narrow Passages with Probabilistic Roadmaps: The Small-Step Retraction Method. Autonomous Robots, 19(3):301-319, Dec. 2005. [pdf] - Delayed collision-checking:
G. Sánchez and J.C. Latombe. On Delaying Collision Checking in PRM Planning – Application to Multi-Robot Coordination, Int. J. of Robotics Research, 21(1):5-26, January 2002. [pdf] (skip the section on multi-robot coordination) - Slides