Class #9:
Criticality-Based Motion Planning: Target Finding
________________________________________________________________________________________________________________
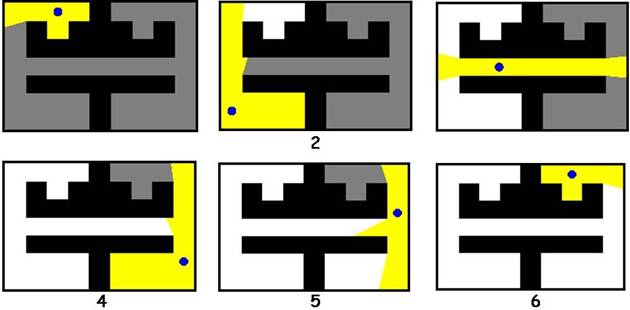
This picture depicts a mobile
robot (blue dot) with omni-directional vision sweeping an environment with
obstacles to find any hiding (and possibly moving) targets
- Topics
- Principles of criticality-based planning
- Application to finding an evasive target in a polygonal environment
- Planning in a belief/information space - Readings:
- Target finding:
S.M. LaValle, D. Lin, L.J. Guibas, J.C. Latombe, and R. Motwani. Visibility-Based Pursuit-Evasion in a Polygonal Environment. Proc. 5th Workshop on Algorihtms and Data Structures (WADS'97), pages 17--30. Springer Verlag, 1997 [pdf]
+
S.M. LaValle, D. Lin, L.J. Guibas, J.C. Latombe, and R. Motwani. Finding an Unpredictable Target in a Workspace with Obstacles. Proc. IEEE Int'l Conf. on Robotics and Automation, pages 737--742, 1997 [pdf] - Slides