|

|
|
Fig. (a)
|
Fig. (b)
|
|
|
|
|
Cardboard box example [MPEG movie (2.43 MB)]
|
|
Héctor H. González-Bańos Cheng-Yu Lee Jean-Claude Latombe
This example was used to test the transient response of the target tracker. The scenes shown in Fig. (a) and Fig. (b) differ in that a cardboard box is present in the former but not in the later. In both experiments the observer was initially located at a distance of 165 in (aiming towards the target), and the tracking program was activated afterwards. The tracking paths for the robot in Fig. (b) is a rather straight-forward path, while the robot in Fig. (a) must swerve around the box in order not to lose the target, and this maneuver must occur almost immediately after the observer becomes aware of its situation. (Watch the video)
|
|
|
|
Fig. (a)
|
Fig. (b)
|
|
|
|
|
Cardboard box example [MPEG movie (2.43 MB)]
|
|
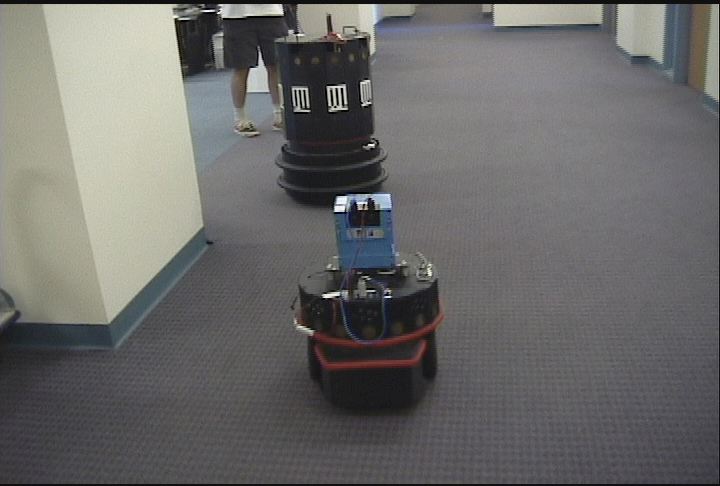
An experimental run is shown here. The tracker followed the target through the Computer Science Robotics Lab. at Stanford University. The tour started outside one of the office at North Corridor. The observer chased the target down the North corridor of the lab, through a center lounge area cluttered with chairs, and into one of the offices in the South corridor. Here we show a series of snapshots as well as the whole video. (Watch the video)
In this second experimental run, the target follows approximately the same route as the first tour example, but in an opposite direction and with a tighter arrangement of obstacles (several chairs and boxes). The tour started at the southern end of the center lounge area. The observer chased the target through the center lounge area with obstacles, and into the North corridor. In this experiment, the observer used a lower odometer sampling rate that enables it to response faster to tracking. (Note: Accessing odometer is, in fact, not necessary for tracking)
Tour example 2 [MPEG movie (6.7 MB)]