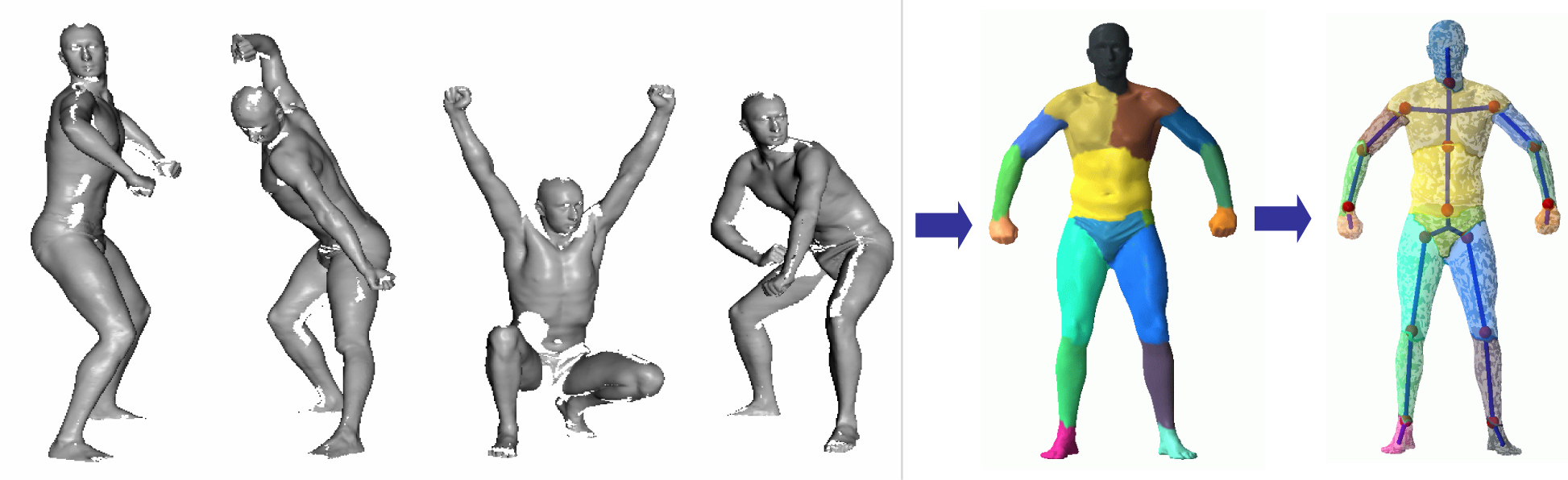
non-rigid technique [the CC algorithm] . It then segments the meshes using a graphical model that captures the spatial contiguity of parts. The segmentation is done using the EM algorithm, iterating between finding a decomposition of the object into rigid parts, and finding the location of the parts in the object instances. Although the graphical model is densely connected, the object decomposition step can be performed optimally and efficiently, allowing us to identify a large number of object parts while avoiding local maxima. We demonstrate the algorithm on several real world datasets, including scans of human arms, wooden puppets and entire human bodies.