SCAPE: Shape Completion and Animation of People
D. Anguelov, P. Srinivasan, D.
Koller, S. Thrun, J. Rodgers, J. Davis
|
A data-driven approach for
building a human shape model which spans variation in both subject
shape and pose from 3D scans. The model is useful for a variety of
animation and shape completion tasks. We can synthesize complete 3D
surfaces for a subject using the output of a marker-based motion
capture system. We can also use our model to complete a partial scans
of different people in different poses.
[SIGGRAPH 2005]
[Go to Project Page]
|
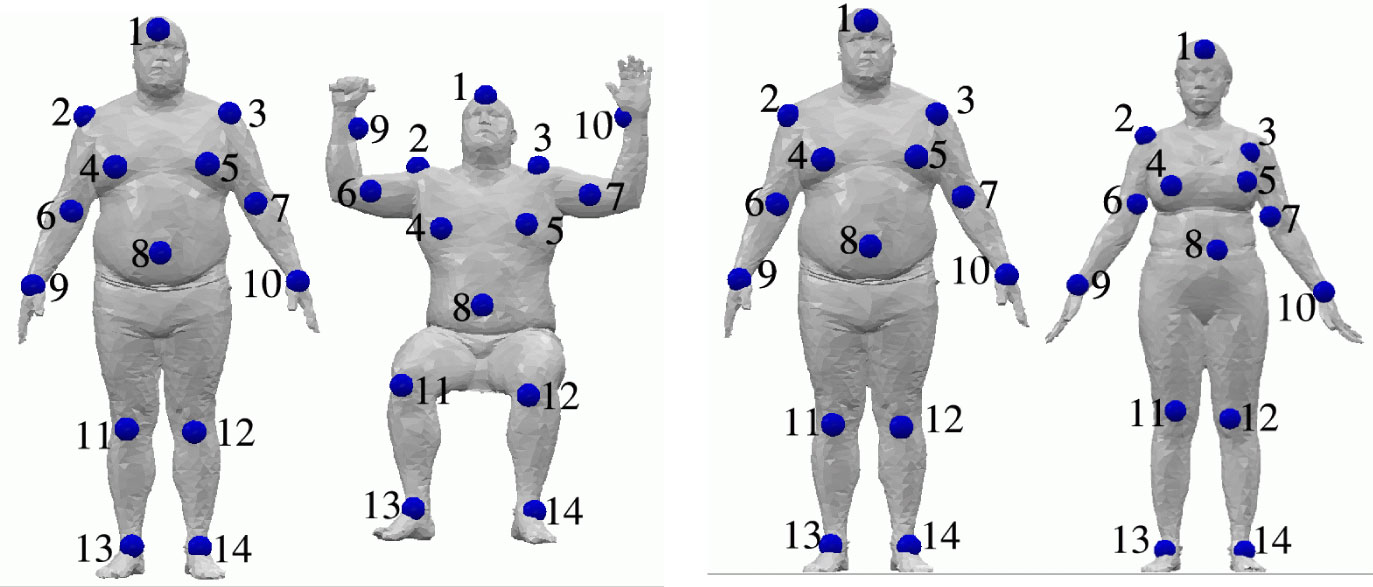
The Correlated Correspondence Algorithm for Surface
Registration
D. Anguelov, P. Srinivasan, D.
Koller, S. Thrun,
H.-C. Pang, J. Davis
|
An algorithm for registering 3D
surface scans of an object undergoing significant deformations.
The algorithm registers two meshes by optimizing a joint probabilistic
model over all point-to-point correspondences between them, which
attempts to capture local geometry and preserve geodesic distances. The
algorithm does not
need markers, nor does it assume
prior knowledge about object shape, the dynamics of its deformation, or
scan alignment (although such knowledge can be incorporated if it is
available).
[NIPS 2004]
[Go to Project Page]
|
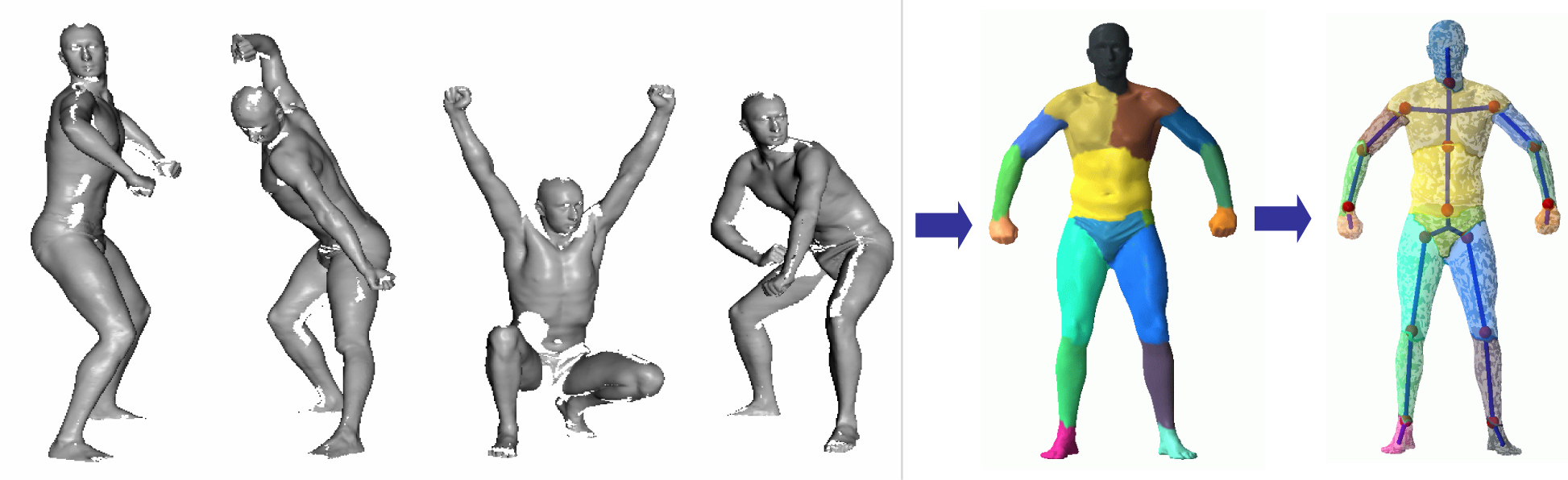
Recovering Articulated
Object Models from 3D Range Data
D. Anguelov, D. Koller, H.-C. Pang, P.
Srinivasan, S. Thrun
|
We describe an algorithm whose
input is a set of meshes corresponding to different configurations of
an articulated
object. The algorithm automatically recovers a decomposition of the
object into approximately rigid parts, the location of the
parts in the different object instances, and the
articulated object skeleton linking the parts. It assumes the
correspondences between the scans are known (we use the Correlated
Correspondence algorithm above to recover them).
[UAI 2004]
[Go to Project Page]
|