5 Degrees of Freedom Robot Arm
Here we consider a 5 dof robot with constrained ranges on the joint
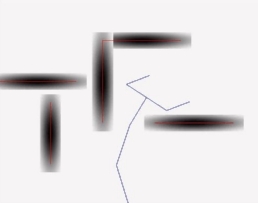
angles. The first problem is to find a path from these initial and final
configurations:

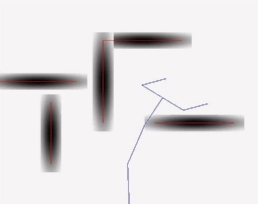
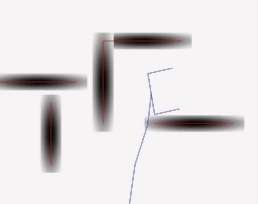
A conservative path can be found with success probability of 0.95,
this path will have length 10.07. The robot must still traverse a narrow
passage (3rd image) in an area of high uncertainty:


Animated Path
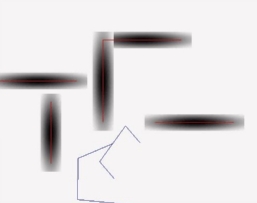
Relaxing the probability of success to 0.81, yields a path of length 9.23.
This path is more direct, but involves entering risky areas in another two
occasions:
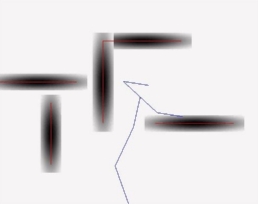
Animated Path
A further relaxation of the constraint to 0.60, the path becomes
much shorter (7.81) and more direct, but involves entering deeper into risky
areas:
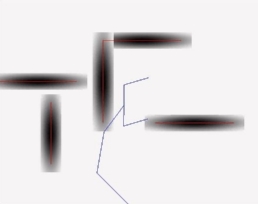
Animated Path