Class #5: Sampling-Based Motion Planning: Probabilistic Roadmaps
________________________________________________________________________________________________________________
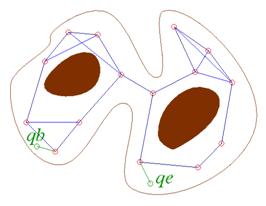
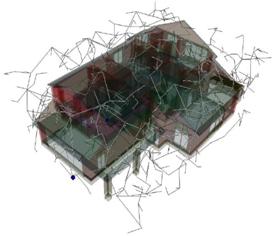
The figure on
the left illustrates the concept of a probabilistic roadmap. The figure in the
middle shows the milestones of a roadmap created for a virtual camera in a
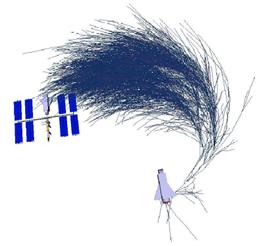
home. The figure on the right shows a probabilistic roadmap tree for docking a
spacecraft against a space station (from Jeff Phillips).
- Topics
- Principle, rationale, and requirements of probabilistic roadmaps
- Multi- and Single-query PRM planners
- Narrow passage issue and expansiveness of free space
- Probabilistic completeness and convergence of PRM planners - Required
- Basic paper on probabilistic roadmaps:
L.E. Kavraki, P. Svestka, J.C. Latombe, and M. Overmars. Probabilistic Roadmaps for Path Planning in High-Dimensional Configuration Spaces. IEEE Transactions on Robotics and Automation, 12(4):566-580, 1996 [pdf] - Analysis of probabilistic-roadmap planner:
D. Hsu, J.C. Latombe, and H. Kurniawati. On the Probabilistic Foundations of Probabilistic Roadmap Planning. Int. J. of Robotics Research, 25(7):627-643, July 2006 [pdf] - Other
- Computation of neearest neighbors in
configuration space:
Plaku, E. and Kavraki, L. E. . Quantitative Analysis of Nearest Neighbors Search in High-Dimensional Sampling-based Motion Planning. In Workshop on Algorithmic Foundations of Robotics (WAFR), - Deterministic vs. random sampling:
S. M. LaValle, M. S. Branicky, and S. R. Lindemann. On the relationship between classical grid search and probabilistic roadmaps. International Journal of Robotics Research, 23(7/8):673-692, July/August 2004. [pdf] - A number of papers on probabilistic
roadmaps and related methods can be found at the websites of:
- Lydia Kavraki
- Nancy Amato
- Mark Overmars
- David Hsu
- James Kuffner
- Steve LaValle
- MOLOG project
- Slides