|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
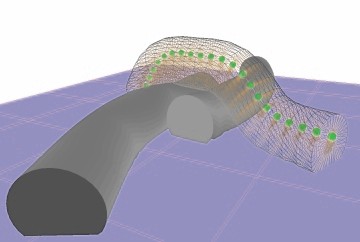
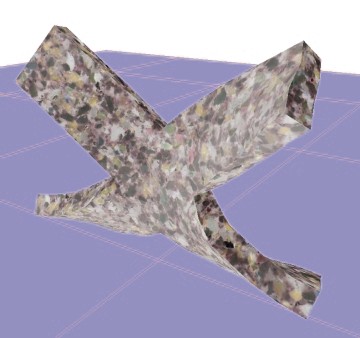
GELs Instead on using finite element methods, we developed a new strategy based on a dual combined representation of global and local deformations. Our virtual models are represented by their surface mesh (composed of triangles) and their medial axis skeleton which express the general shape of the object. Virtual mass nodes are positioned along the skeleton and are connected together using three dimensional springs which control elongation, flexion and torsion. Finally, a network of springs connects the vertices of all triangle edges together to model surface deformations locally. Both global and local models interact together by propagating internal forces between them. Interactions between different objects are computed directly from the global model using collision spheres which are placed at each node of the skeleton. This approach is highly effective since complex scenes with multiple deformable bodies can be simulated towards real time without having to update complex collision trees. For very large scenes, this simulation technique can also run in parallel on multiple processing cores. Interactive Rendering of Deformable Objects Based on a Filling Sphere Modelling Approach F. Conti, O. Khatib and C. Baur. IEEE International Conference on Robotics and Automation, Taipei, 14-19 Sept. 2003 Page(s):3716 - 3721 vol.3 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||